报告名称:Optimal geometric configuration of sensors for received signal strength based cooperative localization of AUVs
报告时间:2020.1.9 14:00-14:40
报告地点: 61#3017
报告人: ASGHAR ABBAS RAZZAQI
报告内容:The theme of this activity was to give introduction to the audience about my recent research about the above mentioned title. The research was about the placement of sensors in their optimal positions so that Received signal strength (RSS) related information from the sensors to the target AUV is maximized so that the accuracy of the cooperative localization is maximum.
Cooperative localization is one of the most recent techniques that are being used for underwater localization. In this technique, few AUVs are deployed at water surface as reference sensors. Exact positions of sensors are known using GPS or other localization technique. The remaining AUVs, called targets, equipped with inertial navigation system are performing the actual underwater operation. The targets maintain their accurate position by taking reference from sensors. In our research, the targets measure the received signal strength of the sensors to estimate their position.
The most important part of cooperative localization is to measure the relative position (RSS in this case) of the targets with respect to the sensors using acoustic waves. However, these measurements are very noisy due to harsh underwater environment. While other limiting factors related to underwater environment cannot be controlled, the accuracy of cooperative localization can still be optimized by maximizing the observability of sensors by keeping them at maximum observable location. These positions are called optimal formation of the sensors.
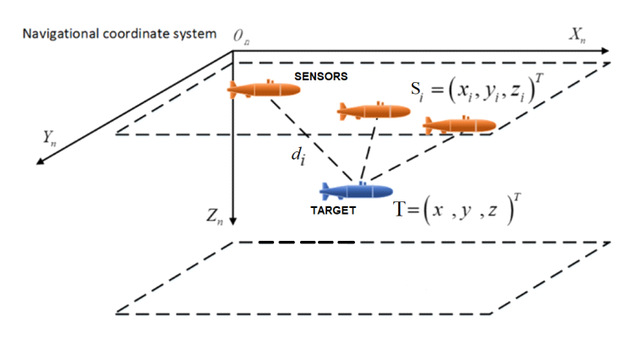
A typical scenario of cooperative localization is shown in the figure below:
In order to estimate the optimal formation, an optimization function was derived using Fisher Information theory. First of all fisher information matrix for each target was defined in term of sensors positions as follows:
where, , , and = measurement noise.
When determinant of the FIM, given by following equation, will reach the maximum value, the corresponding formation will be the optimal formation of the sensors with respect to the given target.
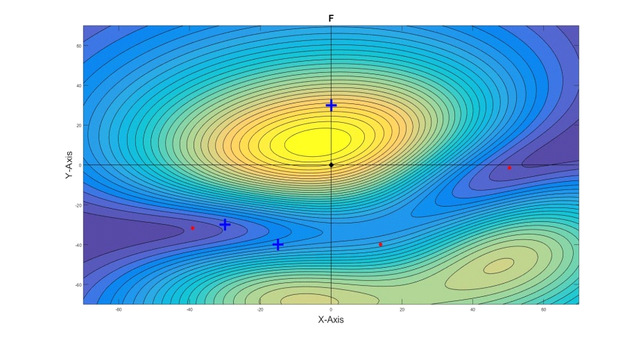
The efficacy of the proposed method was analyzed using simulation examples. One of the example in which one target AUV will be cooperative localized with RSS measurements from three sensors is shown in the fig. below. The figure indicates the initial (blue cross) and optimal positions (red dots) of the sensors and the value of evaluation function in 2D contour plot.