经济模型预测控制(EMPC)作为现在高级控制算法,在过去十年中引起了学术界和工程界的广泛关注。经济模型预测控制适用于众多的工程应用和场景,如大规模供给水网络、复杂化学工艺过程和智能电网。其主要目标是优化一个通用的性能指标(例如经济成本),而不是将闭环轨迹作为一般模型预测控制给定的参考稳态。在这种情况下,经济模型预测控制的目标函数不一定是二次型。然而,保证经济模型预测控制的最优性和稳定性,一直是该领域的一个开放性难题。
近日,407教研室王烨副教授在国际权威期刊International Journal of Robust and Nonlinear Control(JCR Q1区,中科院Top期刊,IF= 3.953)发表文章(Volume 29, Issue 11, 25 July 2019, Pages 3296-3310),提出了一种新型鲁棒经济模型预测控制,通过考虑被控系统中潜在的周期性,利用一个周期约束条件,来保证闭环系统的递推可行性、鲁棒约束满足以及收敛性。
方法框架
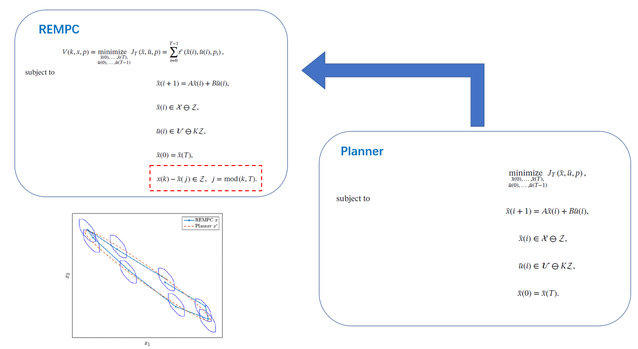
该方法建立了一个全新的模型预测控制最优问题框架。在当前时刻,系统状态反馈并不一定作为预测模型的起始状态,而是通过新增的一个周期约束条件来给定预测模型状态的起始值。此外,为了保证闭环系统的鲁棒性,基于tube的鲁棒条件被考虑到最优问题框架里。该方法也兼顾到系统无扰动时的稳态性能,通过找到一个planner来求解系统的稳态状态和输入。在理想条件下,带有扰动的闭环系统预期运行在planner求解得到的稳态状态附近,附近范围是利用不变集合来定义的。
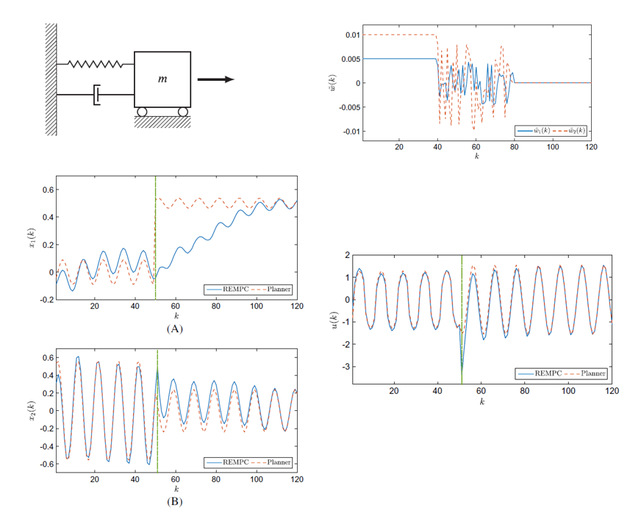
闭环仿真结果
文章中通过对一个阻尼弹簧小车系统的仿真来验证该方法,在系统中存在两个扰动信号时,闭环系统的状态和输入会处在planner求解出系统稳态值。值得注意的是,planner求解出的稳态值并没有被用在鲁棒经济模型预测控制器里强制伴随,而是闭环系统通过鲁棒经济模型预测控制器的最优控制输入来达到的。因此,该结果可以显示带有扰动的闭环控制系统是递推可行的、鲁棒约束满足的以及能收敛到稳态值附近的。
论文链接:
https://onlinelibrary.wiley.com/doi/10.1002/rnc.4551